

Kao jedan od važnijih faktora u konceptu autonomnih vozila LIDAR sistem je od bitne važnosti za samo pozicioniranje vozila i sredine u kojoj se vozilo kreće, odnosno za interakciju između samog vozila i svih objekata u njegovom okruženju. Da bi smo koncept LIDAR sistema i samih LIDAR senzora shvatili kao jedan od bitnijih faktora u autonomnim vozilima, morali bi prvo da razumemo i njihovu pozadinu, odnosno sistem ili bolje rečeno diciplinu sistema koji se zasnivaju na prikupljenim podacima.
LiDAR, ili 3D laser skeniranje, je osmišljen još davnih 1960-ih za otkrivanje podmornica iz aviona, a rani modeli su uspešno korišćeni početkom 1970-ih u SAD, Kanadi i Australiji. Tokom proteklih desetak godina došlo je do značajnijeg pomaka u u potrebi LIDAR senzora. Ovo je praćeno povećanjem svesti i razumevanjem o LIDAR sistemima u industrijama koje nisu isključivo povazane i gde je usvojena primena istih.
Terenski LIDAR sistem
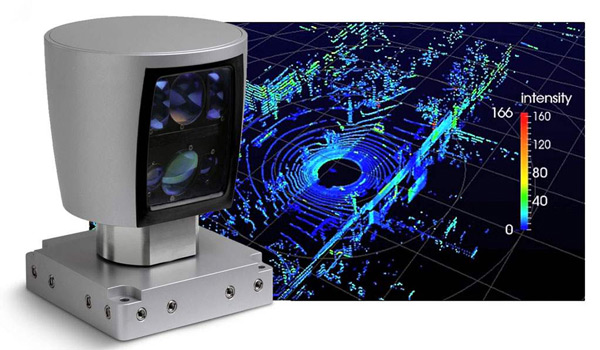
Terenski LIDAR sistemi su veoma slični LIDAR sistemima koji se korsite na letelicama, većina LIDAR sistema je napravljena od LIDAR senzora, GPS resivera, interne merne jedinice ”inertial measurement unit” (IMU), ugrađenog računara i uređaja za čuvanje podataka. Jedina razlika između LIDAR sistema koji se koriste na zemlji i u vazduhu jeste da IMU nije potrebno za tzv. terenski LIDAR sistem koji je uglavnom montiran na stativ na kom LIDAR sensor rotira svih 360 stepeni. Pulsirajući laserski zrak se reflektuje od objekata, kao što su prednje strane zgrada koje se nalaze na pravcu kretanju laserskog zraka, bandera, vegetacije, drugih vozila, i naravno ljudi i životinja. Povratni impulsi se snimaju, a rastojanje između senzora i predmeta se obračunava. Prikupljeni podaci su u ”point cloud” formatu, što je trodimenzionalni niz tačaka, od kojih svaka ima x, y i z pozicije u odnosu na izabrani koordinatni sistem.
Kako radi LIDAR sistem?
Princip LIDAR sistema je zaista vrlo jednostavan. Merenje vremena koje je potrebno da svetlost dođe do površine i vrati se nazad do izvora. Primer: kada upalite baklju površinu koju zaparavo vidite je svetlost od baklje koja se reflektuje preko te površine i projektuje na vašu mrežanjaču. Svetlost putuje veoma brzo 300.000 kilometara u sekundi, tako da pretvaranje svetlosti deluje da je trenutno. Naravno, to nije! Oprema potrebna za merenje mora da radi izuzetno brzo. Tek sa napredkom modernih kompjuterskih tehnologija to je postalo moguće.

Stvarna računica za merenje koliko daleko je povratni svetlosni foton putovao do i od objekta je prilično jednostavna.
LIDAR instrument ispaljuje automatske brze impulse laserske svetlosti na površinu i do 150.000 impulsa u sekundi, senzor na instrumentu meri količinu vremena koja je potrebna da se svaki impuls odbije nazad. Svetlost se kreće konstantnom brzinom tako da LIDAR instrument može da izračuna distancu između sebe i cilja sa viskom preciznošću. Ponavljanjem toga postupka izuzetno velikom brzinom instrument pravi složenu mapu površine koju je izmerio.
Generalno, postoje dva tipa LIDAR metoda detekcije. ”Direct energy” detekcija, takođe poznata kao nepovezana, i koherentna detekcija. Koherentni sistemi su najbolji za “Doppler” ili fazno osetljiva merenja i generalno koriste optičko heterodinu detekciju. To im omogućava da rade sa mnogo manje snage, ali ima veće troškove zbog zahteva za mnogo kompleksnijim primopredajnicima. U oba tipa LiDAR sistema postoje dva glavna modela pulsa: mikropuls i visoko-energentni sistemi. Mikropulsni sistemi su se razvili kao rezultat moćnijih računara sa većim računarskim mogućnostima. Ovi laseri su slabije snage i klasifikovani kao “eye-safe” omogućavajući im da se koriste sa manjim merama bezbednosti. “High energy” sistemi ili visoko energentni sistemi se najčešće koriste za atmosfersko istraživanje gde se često koriste za merenje različitih atmosferskih parametara kao što su visina, gustina oblaka, temperatura, pritisak, vetar, vlaga i tragove koncentracije nekog gasa.

Koje su komponente LIDAR sistema?
Većina LiDAR koriste četiri glavne komponente:
Laseri
Laseri su kategorizovani prema njihovoj talasnoj dužini. Laser opsega od 600-1000 nm se češće koriste za ne naučne svrhe, jer oni mogu biti usmereni i lako apsorbujući za ljudsko oko, ali maksimalna snaga se mora ograničiti da budu tzv. ”eye-safe” bezbedni za oči. Laser sa talasnom dužinom od 1550 nm su uobičajena alternativa pošto nisu u fokusu oka i takođe su ”eye-safe” na mnogo višim nivoima snage. Ove talasne dužine se korsite za veće dometa i u svrhe manje tačnosti. Još jedna prednost 1550 nm talasanih dužina je da se ne vide pod takozvanim noćnim pogledom (night-vision) i stoga je pogodan za vojne namene.
Skeneri i optike
Brzina kojom slike mogu da se razviju je uslovljeno brzinom kojom one mogu da se skeniraju u sistem. Različite vrste metoda skeniranja su dostupne za različite namene. Njihova vrsta optike određuje koja rezolucija i opseg može biti detektovan od strane sistema.
Foto-detektori i elektronski prijemnici
Foto detektor je uređaj koji čita i beleži signal koji je vraćen ka sistemu. Postoje dve glavne vrste foto detektor tehnologija, ”solid state” detektori i foto multiplikatori.
Navigacija i sistemi pozicioniranja
Kada se LIDAR senzor postavi na mobilnu platformu kao što su sateliti, avioni ili automobili, neophodno je da se odredi i njihova apsolutna pozicija i orijentacija senzora da bi se dobili upotrebljivi i tačni podaci podaci. Global Positioning Systems – GPS obezbeđuje preciznu geografsku informaciju na osnovu pozicije senzora i Inertia Measurement Unit (IMU) beleži preciznu orijentaciju senzora na toj lokaciji. Ova dva uređaja obezbeđuju metod za prevod podataka senzora u statičke tačke za upotrebu u različitim sistemima.
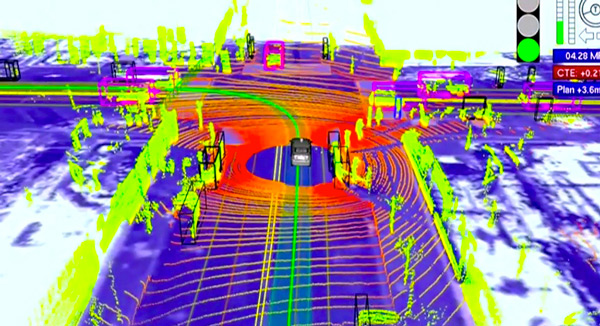
LIDAR je postao sve više populara kao sistem za navođenje autonomnih vozila. Brzina i tačnost skenera znači da se podaci mogu preneti u sistem da se obrade i vrate više ili manje u realnom vremenu. Ovo omogućava uređaju koje kontroliše vozilo da prepozna prepreke i da ažurira svoju rutu u veoma maloj količini vremena.
LIDAR je već našao i primenu u komercijalnim vozilima kroz razne vidove tehnologija i asistencija vozačima tokom vožnje.
LIDAR se koristi za kreiranje Adaptive Cruise Control (ACC) sistema za komercijalne automobile. Siemens i Hella koriste LIDAR uređaj postavljen na prednjem delu vozila da nadgledaju razdaljinu između vozila i bilo kog drugog vozila ispred njega. Često, laseri su postavljeni na branik vozila. U slučaju da vozilo ispred usporava ili je preblizu, ACC primenjuje kočnicu da bi usporio ili zaustavio vozilo. Kada je put ispred čist, ACC omogućava vozilu da ubrza do brzine koju je postavio vozač.
LIDAR je takođe prisutan u sistemu Pre-Scan gde laseri skeniraju površinu puta nekoliko stotina puta u sekundi. Zatim se ova informacija prosleđuje putnom računaru u vozilu i procesuira u frakciji od sekunde koje prilagođava pojedinačno vešanja na svakom točku. Cilj ove tehnologije je da se obezbedi besprekorni i najsigurniji mogući prevoz umanjujući reakcije točka i gume na nedostacima na površini asfalta ili da upozori o preprekama ili tzv. udranim rupama.
Dalja objašnjenja pojmova korišćenjih u ovom tekstu možete pronaći u sledećim materijalima: Početak i primena robotizovanih vozila u saobraćaju.







{kind=link}