











Razvoj i napredak autonomnih vozila zavisi u istoj meri ne samo od upravljačkog programa već i od projektantskih rešenja poput senzora i efektora koji čine sam hardver autonomnih vozila.
Senzori predstavljaju opažajnu spregu između vozila(robota) i okruženja. Postoje dve vrste senzora: Pasivni senzori i aktivni senzori. Pasivni senzori, kao što su kamere, su robotski posmatrači okruženja, oni hvataju signale koje generišu drugi izvori u okruženju. Aktivni senzori, kao što je sonar, šalju energiju u okruženje, i oslanjaju se na činjenicu da se ta energija reflektuje od okruženja i vraća nazad ka senzoru. Aktivni senzori prikupljaju više informacija od pasivnih senzora. Bez obzira da li su aktivni ili pasivni, senzori se dele na tri vrste u zavisnosti od toga da li opažaju okruženje, lokaciju posmatranog predmeta ili uređaja, ili njegovu unutrašnju konfiguraciju.
Tipovi senzora:
Daljinomeri
To su senzori koji mere udaljenost do obližnjih objekata. Prve verzije daljinomera su bili sonarni senzori, koji su bili u upotrebi u samim začetcima robotike. Oni emituju zvučne talase usmerene ka objektima okoline, koji se reflektuju i deo zvuka se vraća u senzor. Vreme i jačina povratnog signala su pokazivali udaljenost obližnjih objekata. Ova tehnologija se još uvek ponegde primenjuje u podvodnim vozilima bez posade. Postoji još jedna tehnologija koja je preteča daljinometara a to je stereo viđenje. Većina današnjih terenskih vozila je opremljena daljinomerima. Ovi optički daljinomeri emituju aktivne signale (svetlost) i mere vreme dok se refleksija tog signala ne vrati u senzor. Drugi tip daljinomera koji su inače i najzastupljeniji na terenskim vozilima jesu takozvani skenirajući lidari, to su specijalne 1-pikselne kamere koje koriste laserske zrake, koji se usmeravaju pomoću složeno podešenih ogledala ili rotirajućih elemenata.
Radar je još jedan tip senzora za merenje daljine koji se uglavnom koristi u podvodnim vozilima. Oni mogu da mere rastojanja od više kilometara. I kao još jedna vrsta senzora za merenje daljine su tzv. taktalni senzori. To su ustvari senzori koji su osetljivi na dodir i mere razdaljniu na osnovu fizičkog kontakta, mogu se primeniti samo za opažanje objekata koji su veoma blizu robota [10].
Senzori lokacije
To su senzori koji koriste opažanje rastojanja kao prvenstvenu komponentu za određivanje lokacije. U otvorenom prostoru je sistem globalnog pozicioniranja (eng.: Global Position System – GPS) najčešće rešenje za problem lokalizacije. GPS meri razdaljinu od satelita koji emituju pulsirajuće signale. Trenutno u zemljinoj orbiti postoji 313 satelit koji emituju pulsirajuće signale na više različitih frekvencija. GPS prijemnici mogu da utvrde udaljenost od ovih satelita analizom pomeraja faze. Triangulacijom signala iz više satelita, GPS prijemnici mogu da utvrde svoju apsolutnu lokaciju na zemlji sa preciznošću od nekoliko metara. Da bismo dobili preciznija merenja odnosno lokacije, koristi se diferencijalni GPS, koji uključuje drugi zamaljski prijemnik sa poznatom lokacijom, pa se pod idealnim uslovima dobija milimetarska preciznost.
Proprioceptivni senzori
Treća značajna klasa senzora, koji obaveštavaju robota o vlastitom kretanju. Oni se uglavnom koriste kod čovekolikoh robota i u industrijskim robotima gde se koriste za merenje precizne konfiguracije robotskog zgloba. Jedna od vrsta ovakvih senzora jesu odometri, koji se koriste kod autonomnih vozila za izveštavanje sistema pomoću osovinskih enkodera o obrtajima točkova, a svrha im je merenje odometrije – odnosno pređenog puta.
Dalje u tekstu možete pronaći objašnjenja različitih vrsta senzora koji se koriste kod autonomnih vozila
Radar je senzor koji koristi radio talase da odredi opseg-razdaljinu, smer ili brzinu objekata. Radar je tajno razvijan od nekoliko zemalja još pre i tokom Drugog svetskog rata. Termin RADAR je nastao u Sjedinjenim Američkim Državama tokom 1940 godine od strane mornarice kao akronim za RAdio Detection And Ranging. Moderna upotreba radara je veoma raznovrsna, primenjuje se u raznim sferama: vazduhoplovstvu, nadgledanju morskih dubina, u astronomiji, vazdušno odbrambenim sistemima, medicini… Veliku upotrebu dobija i u autonomnim sistemima za upravljanje vozilima.
LADAR/LIDAR – LAser Detection And Ranging ili LIght Detection And Ranging koristi lasersku svetlost da otkrije udaljenosti objekata, slično radarskim sistemima. LIDAR laseri koristi ultraljubičaste, vidljive, ili skoro blizu infracrvene svetlosti, da bi oslikali objekte i mogu se koristiti za širok spektar ciljeva uključujući nemetalne objekte, stene, kišu, hemijska jedinjenja, aerosoli, oblake, pa čak i pojedinačne molekule. Uski laserski zrak može da mapira fizičke osobine objekata sa veoma viskom rezolucijom. LIDAR tehnologija se koristi u robotici za opažanje životne sredine, kao i za klasifikaciju objekata. Sposobnost LIDAR tehnologije omogućava da obezbedi trodimenzionalne mape terena, visoku preciznost udaljenosti, i brzinskim pristupom da omogući bezbedno zaustavljanje vozila sa viskom stepenom tačnosti. LIDAR se kod vozila koristi u adaptivnoj kontroli kretanja (Adaptive Cruise Control – ACC). Sistemi poput Siemens-a i Hella koriste LIDAR uređaje monitirane na prednjem delu vozila, kao što je na braniku, da prate rastojanje između vozila, i bilo kog vozila ispred, slika br.1.
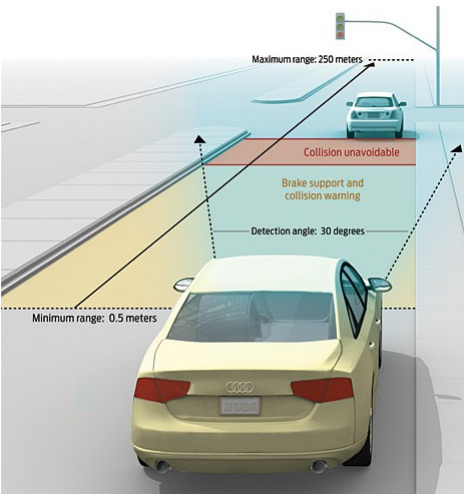
Slika br.1 Šematski prikaz snopa svetlosti LIDAR-a
GPS je sistem zasnovan na prostoru satelitske navigacije, koji obezbeđuje tačnu lokaciju i poziciju vozila u svim vremenskim uslovima, bilo gde na zemlji. U robotici primena GPS uređaja se zasniva na samostalnoj navigaciji korišćenjem GPS senzora, koji izračunavaju geografsku širinu, dužinu, vreme i brzinu, pa na osnovu kordinata mape daju informacije sistemima unutar autonomnih vozila.
Computer Vision je polje koje obuhvata metode za dobijanje, obradu, analiziranje i razumevanje slike i, u principu, visoko dimenzionalne podatake iz realnog sveta u cilju da proizvedu numeričke ili simboličke informacije. Kao tehnološka disciplina, Computer vision nastoji da primenjuje svoje teorije i modele za izgradnju CV sistema. Primeri ove tehnologije se mogu naći u raznim sistemima, pa i u robotici odnosno sistemu autonomnog vozila.
Odometar ili odograph je instrument koji služi za da pokaže udaljenost koju je vozilo prešlo. Većina odometara radi brojanjem rotacije točkova, pređeno rastojanje se meri brojem obrtaja točka puta dimenzija obim gume.
Dalja objašnjenja pojmova korišćenjih u ovom tekstu možete pronaći u sledećim materijalima: Početak i primena robotizovanih vozila u saobraćaju.


















 senzori")
{kind=link}