











Adaptivno upravljanje je metod upravljanja koji se koristi kod sistema gde regulator mora da se prilagodi sistemu kojim se upravlja i čiji parametri se menjaju ili su inicijalno neizvesni. Adaptivno upravljanje se npr. koristi kod upravljanja avionom. Masa aviona (kao jedan od parametara sistema) opada pri potrošnji goriva, pa je potrebno zakon upravljanja prilagoditi ovakvim promenljivim uslovima.
Uobičajeni pristup u sintezi sistema upravljanja je odrediti linearni model procesa za određenu radnu tačku, a zatim na temelju parametara procesa, za koje se pretpostavlja da su konstantni, odrediti odgovarajuću strukturu i parametre regulatora. U praksi se može očekivati da se parametri procesa menjaju tokom rada u većoj ili manjoj meri. Naime, zbog nelinearnosti koje se javljaju u procesu, različitim radnim tačkama odgovaraju različiti parametri linearnog modela procesa. To znači da se promenom radne tačke menjaju i parametri procesa na temelju kojih su određeni parametri regulatora. Zbog inherentne robusnosti sistema s povratnom spregom kako na poremećaje tako i na greške modeliranja procesa, u najvećem broju slučajeva regulator s konstantnim parametrima određenim za neku nominalnu radnu tačku osiguraće zadovoljavajuće odzive sistema upravljanja. Ima pak slučajeva, kada su promene parametara procesa toliko izražene da regulator s konstantnim parametrima ne daje zadovoljavajuće odzive. U praksi postoji mnogo različitih uzroka promena parametara procesa, a često se radi i o kombinaciji različitih pojava. Za mnoge slučajeve, uzroci promena parametara procesa nisu potpuno objašnjeni.
Strategije adaptivnog upravljanja
Postoje tri osnovne strategije kod adaptivnog upravljanja:
- Gain scheduling
- Adaptivno upravljanje na bazi referentnog modela (engl. Model-reference adaptive control)
- Samopodešavajući regulatori (engl. Self-tuning regulators)
Gain scheduling
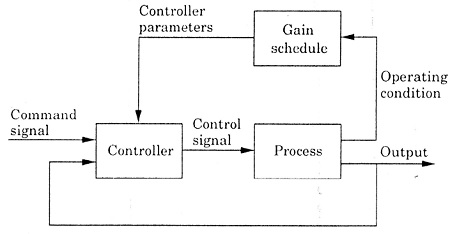
U mnogim slučajevima moguće je meriti procesne veličine koje su u korelaciji s promenama dinamičkog odziva procesa. Te procesne veličine mogu se upotrebiti tako da se na temelju njihovih izmerenih vrednosti postavljaju odgovarajući parametri regulatora. Ovaj pristup se naziva gain scheduling. Ovaj naziv je uveden jer se strategija prvenstveno koristila tako što se merilo pojačanje (engl. gain) procesa, te se na temelju izmerenog pojačanja procesa prema određenim pravilima menjalo pojačanje regulatora. Tako da se kompenzovala promena pojačanja procesa. (engl. schedule – plan, raspored). Blok dijagram sistema upravljanja zasnovanog na gain schedulingu prikazan je na slici 1. Sistem se može posmatrati kao dve petlje. Unutrašnja petlja se sastoji od procesa i osnovnog regulatora, dok spoljašnja petlja podešava parametre regulatora na temelju radnih zahteva određenih merenjem odgovarajućih procesnih veličina.
Slika 1. Blok dijagram sistema upravljanja sa Gain scheduling-om
Gain scheduling se može posmatrati kao preslikavanje sa prostora procesnih parametara u prostor parametara regulatora, što se može realizovati u obliku funkcije odnosno look-up tabele. Ova metoda je razvijena za primenu u upravljanju avionima, pri čemu su se parametri regulatora postavljali na bazi merenja brzine i visine aviona.
Adaptivno upravljanje na bazi referentnog modela
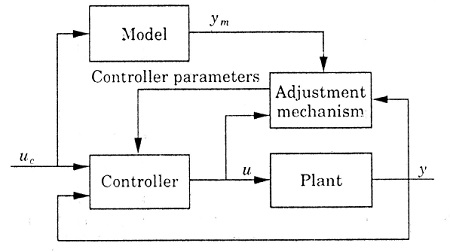
Sistemi adaptivnog upravljanja na temelju referentnog modela izvorno su bili namenjeni za slučajeve kada se sistemom upravljanja treba postići dinamički odziv koji u što većoj meri odgovara zadatom referentnom modelu uprkos značajnim promenama parametara procesa. Blok dijagram adaptivnog sistema upravljanja zasnovanog na referentnom modelu prikazan je na slici 2. Sistem se može posmatrati kao dve petlje. Unutrašnja petlja je uobičajni regulacioni krug koji čine proces i regulator, dok je uloga spoljašnje petlje podešavanje parametara regulatora tako da se postigne da greška
e = y – ym
(gde je y – izlaz procesa, a ym – izlaz referentnog modela) bude što je moguće manja.
Slika 2. Blok dijagram sistema upravljanja zasnovanog na referentnom modelu
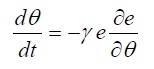
Jedan od načina da se ovo postigne je primena tzv. MIT pravila:
gde je Θ parametar regulatora, γ parametar koji određuje brzinu adaptacije. Izraz ∂e /∂Θ predstavlja osetljivost greške e na promenu parametra Θ.
Samopodešavajući regulatori
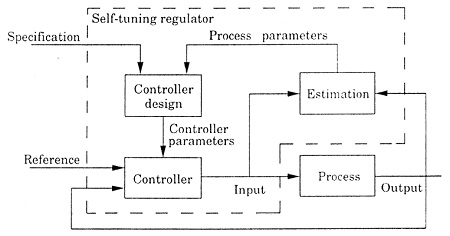
Kod samopodešavajućih regulatora, parametri regulatora ne određuju se direktno na temelju mernih signala kao kod gain schedulinga i adaptivnog upravljanja zasnovanog na referentnom modelu, već na temelju parametara procesa estimiranih tokom rada sistema. Blok dijagram sistema upravljanja sa samopodešavajućim regulatorom prikazan je na slici 3. Takođe sistem možemo posmatrati kao dve petlje. Unutrašnja petlja je uobičajni regulacioni krug koji čine proces i regulator, dok je uloga spoljašnje petlje podešavanje parametara regulatora na temelju estimiranih parametara procesa. Parametri procesa se estimiraju na temelju merenja ulaznih i izlaznih veličina procesa. Ti parametri se koriste za sintezu regulatora (engl. controller design) koja se obavlja neprestano tokom rada sistema na temelju najnovijih estimiranih vrednosti parametara procesa. Algoritam za sintezu regulatora određuje parametre regulatora koji osiguravaju zadovoljavajući dinamički odziv sistema za estimirane parametre procesa. Često se za sintezu regulatora primenjuje metoda postavljanja polova (engl. pole placement).
Slika 3. Blok dijagram sistema upravljanja sa samopodešavajućim regulatorom


















{kind=link}