











 Želite da se bavite robotikom, a ne znate odakle da počnete? Ovo je pravi članak za vas. U ovom step-by-step tutorijalu biće pokazano kako da napravite vaš prvi robot korišćenjem Arduino open source razvojne platforme. Način konstruisanja šasije robota, koji je prikazan u ovom članku, je samo primer kako da brzo i lako napravite robot. Naravno, robot možete napraviti i na mnogo drugih načina, kao i od drugačijih materijala. Vaša mašta je granica.
Želite da se bavite robotikom, a ne znate odakle da počnete? Ovo je pravi članak za vas. U ovom step-by-step tutorijalu biće pokazano kako da napravite vaš prvi robot korišćenjem Arduino open source razvojne platforme. Način konstruisanja šasije robota, koji je prikazan u ovom članku, je samo primer kako da brzo i lako napravite robot. Naravno, robot možete napraviti i na mnogo drugih načina, kao i od drugačijih materijala. Vaša mašta je granica.
Potrebni delovi i alat
1 × Arduino Uno/Duemilanova
Arduino Uno (Slika 1) je mikrokontrolerska ploča zasnovana na ATmega328 mikrokontroleru. Više o ovoj razvojnoj ploči možete pročitati ovde.
Slika 1. Arduino Uno
1 × standardni servo motor
U osnovi, servo motori su DC motori sa mogućnošću podešavanja njihove pozicije tj. ugla. To znači da možete mikrokontroleru, preko vašeg koda, da “naredite” da pomeri servo motor na željenu poziciju. Standardni servo motori mogu maksimalno biti zakrenuti za ugao od 180°. Servo motori koji se koriste u amaterske svrhe najčešće se napajaju naponima između 4,8V i 6V. Servo motori najčešće povezuju preko tri provodnika. Dva služe za napajanje samog motora (Vcc i GND), dok je treći zadužen za prenos upravljačkih signala sa mikrokontrolera.
 Slika 2. Standardni servo motor
Slika 2. Standardni servo motor 1 × L293D drajver motora
L293D (Slika 3) je 16-pinski integrisani drjaver koji se može koristiti za pokretanje DC motora manjih struja. Više o ovom integrisanom kolu možete pronaći ovde.
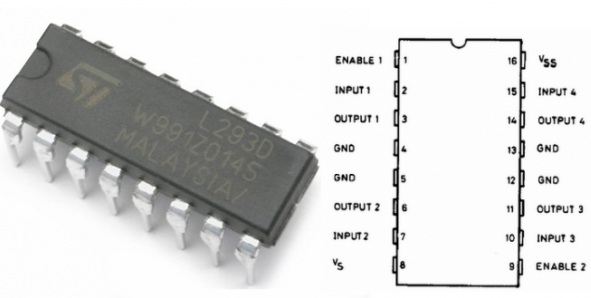
Slika 3. Integrisano kolo L293D
2 × plastični DC motor sa reduktorom
Plastični motori sa reduktorom (Slika 4) su veoma lagani, malih dimenzija i jednostavni za montažu. Ovi motori su dostupni sa različitim maksimalnim brzinama. Za vaš robot možete kupiti motor sa brzinom između 60 i 100 RPM.
 Slika 4. Plastični motori sa reduktorima
Slika 4. Plastični motori sa reduktorima 2 × točkovi, kompatibilni sa plastičnim motorima
Točkovi moraju biti takvi da ih je lako pričvrstiti za izlazne osovine motora. Točkovi koji će biti prikazani u ovom projektu (Slika 5) povezuju se sa osovinama motora pomoću vijaka.
 Slika 5. Točkovi
Slika 5. Točkovi 1 × Omnidirekcioni točak (eng. Castor Wheel)
Robot koji izrađujemo u ovom projektu ima dva točka, te mu je potreban barem još jedan oslonas, kako bi mogao da se kreće. Treći oslonac predstavljaće omnidirekcioni točak prikazan na slici 6.

Slika 6. Omnidirekcioni točak
1 × Sharp GP2D12 analogni senzor rastojanja
Ovaj senzor se sastoji od dva “oka”. Jeno oko šalje infrcrvenu svetlost, a drugo oko “vidi” odbijanje te infracrvene svetlosti i meri rastojanje senzora od predmeta od kog se svetlost odbila. Informacija o rastojanju se šalje na ADC mikrokontrolera kako bi se preduzele određene radnje kada se ispred robota nalazi prepreka. Moguće je da nećete pronaći senzor sa ovom oznakom. Druga opcija je Sharp GP2Y0A02YK. Razlika između ova dva snezora je opseg merenja rastojanja. Prvi senzor meri rastojanja u opsegu od 10 cm do 80 cm, a drugi u opsegu od 20 cm do 150 cm. Kao i servo motor, i ovaj senzor koristi tri provodnika: dva za napajanje, a preko trećeg šalje signal ka mikrokontroleru. Kada budete kupovali ovaj senzor, nabavite i JST 3-pinski konektor, kako biste lakše povezali senzor. Senzor je prikazan na slici 7.
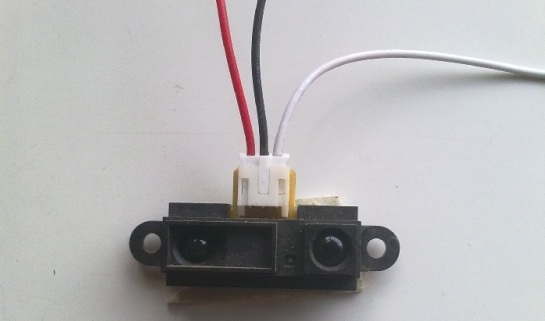
Slika 7. Sharp GP2D12
Baterije
Preporuka je da razdvojite napajanje motora i “elektronike”. Za Arduino je potrebno napajanje od 9V, te za napajanje elektronike možete koristiti bateriju od 9V (slika 8). Za napajanje pogonskih motora i servoa možete koristiti 4 AA baterije (6V).
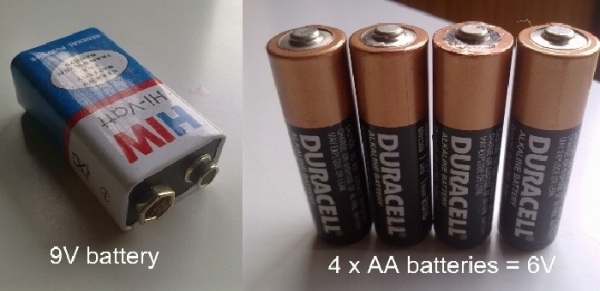 Slika 8. Baterije
Slika 8. BaterijeKako biste povezali povezali 4 AA baterije, potreban vam je i držač za baterije prikazan na slici 9.
 Slika 9. Držač AA baterija
Slika 9. Držač AA baterija 2 × konektori za baterije
Potrebna su vam i dva konektora za baterije (Slika 10). Jedan od njih na svom kraju treba da ima DC konektor napajanja kako bi se direktno mogao povezati sa Arduinom.
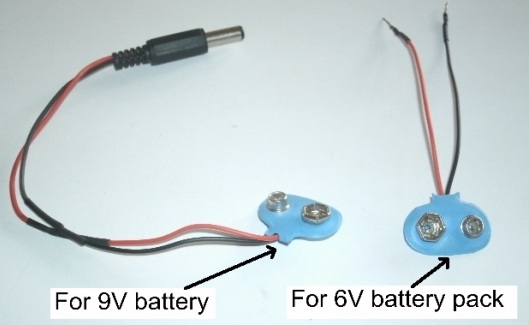 Slika 10. Konektori za baterije
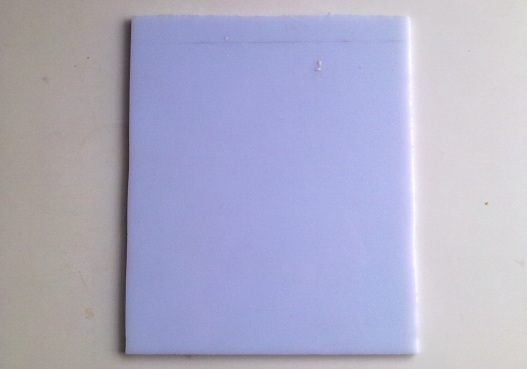
Slika 10. Konektori za baterije 1 × plastična ploča
Ova plastična ploač će biti korišćena kao osnova robota. Ne morate koristiti plastičnu ploču. Mošeto biti i drvena ili aluminijumska ploča, ali treba biti što lakša. Dimenzije i oblik ploče zavise od konstrukcije vašeg robota. Ploča koju ćemo mi koristiti prikazana je na slici 11.
Slika 11. Plastična ploča kao osnova robota
Obostrana lepljiva traka
Ne želimo da koristimo vijke pri montiranju komponenata. Sve komponente ćemo pomoću obostrane lepljive trake (slika 12) pričvrstiti za plastičnu ploču.
 Slika 12. Obostrana lepljiva traka
Slika 12. Obostrana lepljiva traka Ostali delovi i potreban alat
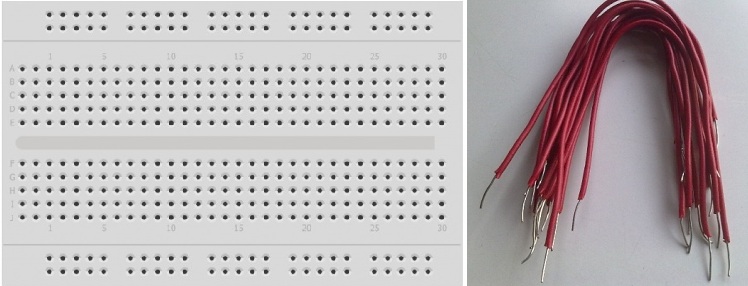
Kako bismo povezali sve delove robota sa Arduino razvonom pločom, biće nam potreban jedan manji protobord. Takođe, kako bismo stvarali veze na protobordu, biće nam potreban set muško-muških džampera. Protobord i džamperi prikazani su na slici 13.
 Slika 13. Protobord i džamperi
Slika 13. Protobord i džamperiBiće nam takođe potreban i jedan USB kabl kojim ćemo povezati Arduino i PC, i koji će nam omogućiti učitavanje kodova u mikrokontroler. Od alata, koristićemo lemilicu, picetu i makaze.
Sklapanje robota i povezivanje delova
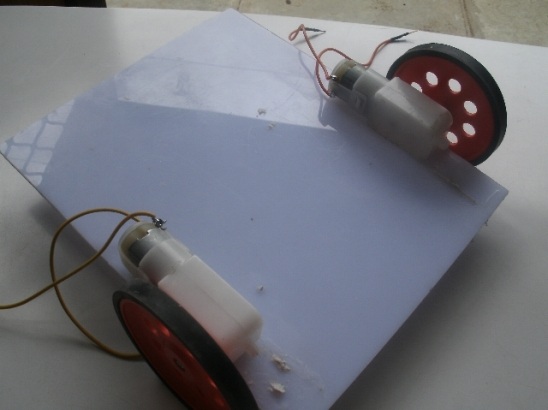
Kada smo pribavili sve potrebne delove i alat, možemo krenuti sa sastavljanjem našeg robota. Prvo ćemo zalemiti komade provodnika na kontakte pogonskih motora (Slika 14). Drugu stranu zalemljenih provodnika kasnije treba povezati na protobordu sa drugim komponentama, pa morate koristiti provodnike koje je moguće utaknuti u protobord.
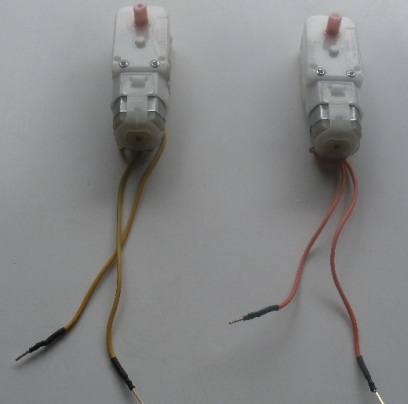
Slika 14. Motori sa zalemljenim provodnicima
Zatim, na osovine motora treba postaviti točkove (Slika 15). Kao što smo već rekli, naši točkovi se pomoću vijaka pričvršćuju za osovine. Treba voditi računa o tome da ne preterate sa pritezanjem vijaka, jer može doći do oštećenja osovine ili reduktora motora.

Slika 15. Točkovi pričvršćeni za osovine motora
Nakon toga treba postaviti omnidirekcioni točak na ploču koju ćemo koristiti kao osnovu robota. Iako na sebi ima otvore za postavljanje vijaka, točak ćemo sa pločom spojiti pomoću obostrane lepljive trake. Na taj način ćemo izbeći bušenje ploče i u velikoj meri pojednostaviti izradu. Točak treba da se nalazi sa predenje strane robota i treba da bude postavljen na sredini ploče, kako se robot ne bi prevrtao. Na narednoj slici prikazaćmo točak koji je pričvršćen za plastičnu ploču.

Slika 16. Omnidirekcioni točak pričvršćen za plastičnu ploču
Sada možemo postaviti motore sa točkovima na ploču. Njih takođe možemo pričvrstiti obostranom lepljivom trakom. Međutim, postoji mogućnost da ona ne može da drži težinu robota (pošto ćemo motore postaviti sa gornje strane ploče, videti sluku 17.), pa je poželjno motore zalepiti superlepkom. Problem sa lepljenjem lepkom je u tome što kasnije nećete moći da razdvojite motore od ploče. Najbolje rešenje bi bilo da napravite držače, koje ćete vijcima vezati za ploču, a koji će držati motore. Rastojanje između omnidirekcionog točka i pogonskih točkova treba da bude što je manje moguće. Naravno, točkovi se moraju namontirati tako da se ne dozvoli prevrtanje robota. Robot će biti najokretniji ako se osa točkova nalazi na sredini ploče, jer će tada robot moći da se okrene oko svoje ose. Mi smo točkove postavili malo iza sredine ploče, jer smo ograničeni prostorom potrebnim za postavljanje ostalih komponenata robota.
Slika 17. Motori sa točkovima, postavljeni na ploču
Koristeći obostranu lepljivu traku postavite servo motor, protobord, Arduino i baterije na ploču, kao što je prikazano na slici 18. Servo motor postavite iznad omnidirekcionog točka. To će biti prednja strana robota. Arduino okrenite tako da vam USB priključak bude sa zadnje strane robota, kako biste lakše mogli da mu pristupite kada budete učitavali programe.
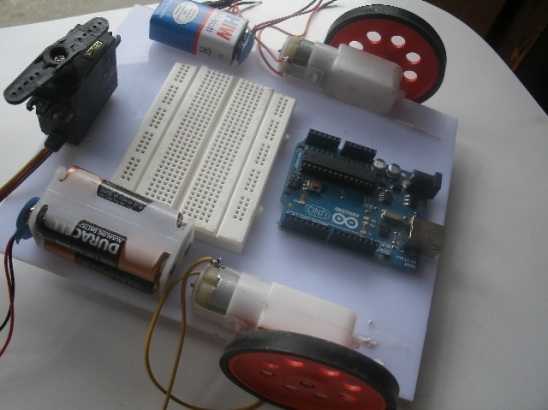
Slika 18. Postavljanje komponenata na ploču robota
Senzor rastojanja treba postaviti na servo motor, ali to nemojte još činiti. Najpre servo motor morate dovesti na sredinu opsega, a to ćete uraditi kasnije, kada servo povežete sa arduinom.
Sada dolazi najvažniji deo sklapanja robota: povezivanje komponenata. Temeljno analizirajte šemu povezivanja koja je prikazana na slici 19, a zatim i povežite sve kao na šemi. Nakon toga dva ili tri puta proverite da li sve ispravno povezali, pre nego što priključite napajanje, tj. baterije. U suprotnom možete, usled pogrešnog povezivanja, uništiti neku komponentu.
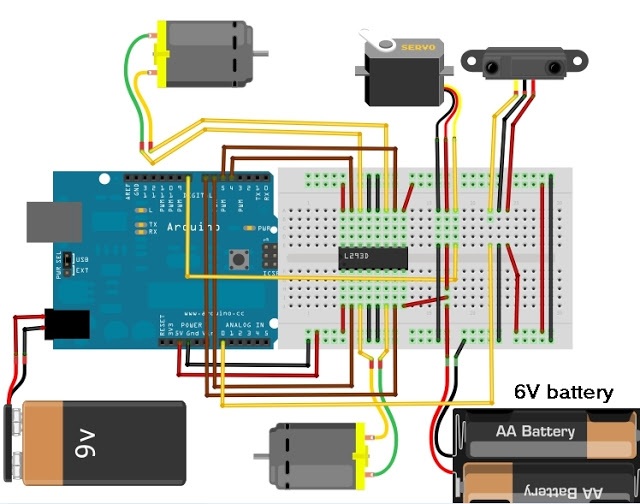
Slika 19. Povezivanje komponenata sistema
Senzor i oba enable pina L293D drajvera treba povezati na +5V, koje ćete dobiti na Arduino ploči. Arduino se povezuje na 9V, ali za svoje napajanje koristi 5V koje dobija pomoću regulatora napona. Signalni provodnik senzora treba povezati sa analognim ulazom Arduina (pin 0), a signalni provodnik servo motora sa digitalni izlazom Arduina (pin 8). Kao što smo napomenuli, servo motor ćemo napajati naponom od +6V, kao i pogonske motore. Kada sve povežete u skladu sa šemom prikazanom na slici 19. vaš robot bi trebalo da bude nalik našem gotovom robotu koji je prikazan na slici 20.
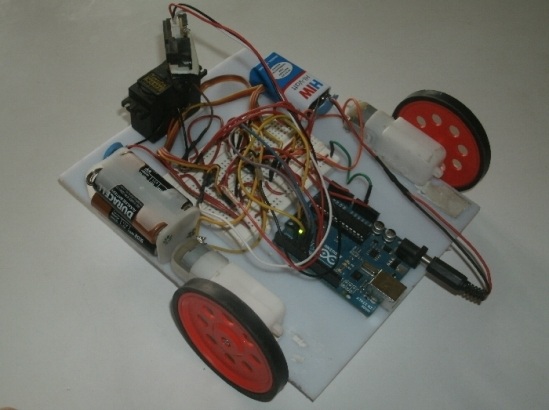
Slika 20. Izgled gotovog robota
Ovo bi bio prvi deo tutorijala o pravljenju jednostavnog robota. U narednom članku (koji možete pročitati ovde) pozabavićemo se programiranjem robota. Objasnićemo algoritam rada robota, prikazaćemo kod, a videćemo i kako se robot kreće.
Arduino možete poručiti ovde.



















{kind=link}
https://tehnickoiinfoobrazovanje.wordpress.com/smotre-takmicenja/