











 ISAS (Institute of Space and Astronautical Science) je japanska nacionalna istraživačka institucija koja je deo JAXA-e (Japan Aerospace Exploration Agency) japanske nacionalne svemirske agencije. Zapravo, 1.oktobra 2003.godine JAXA je formirana spajanjem ISAS-a, NAL-a (National Aerospace Laboratory of Japan) i NASDA (National Space Development Agency of Japan) u jednu organizaciju. Sam ISAS je prvobitno nastao kao institut u okviru Tokijskog Univerziteta ’50-ih, i njegov glavni fokus tada bio je razvoj raketnih sistema.
ISAS (Institute of Space and Astronautical Science) je japanska nacionalna istraživačka institucija koja je deo JAXA-e (Japan Aerospace Exploration Agency) japanske nacionalne svemirske agencije. Zapravo, 1.oktobra 2003.godine JAXA je formirana spajanjem ISAS-a, NAL-a (National Aerospace Laboratory of Japan) i NASDA (National Space Development Agency of Japan) u jednu organizaciju. Sam ISAS je prvobitno nastao kao institut u okviru Tokijskog Univerziteta ’50-ih, i njegov glavni fokus tada bio je razvoj raketnih sistema.
Danas je ISAS ima mnogo širi spektar delatnosti, i jedna od njih uključuje razvoj robotskih sistema za istraživanje nepoznatih prostranstava, među kojima, u skorijoj budućnosti su u planu Mesec i Mars. Misija na Mesec, pod nazivom “SELENE-2” (Selenological and Engineering Explorer 2) je zakazana za 2017. i ona će se sastojati od satelita koji bi orbitirao oko Meseca, i bazne stanice koja će se spustiti na površinu iz koje bi rover započeo svoju misiju. Svrha “SELENE-2” je sakupljanje informacija o geoloskim karakteristikama tla. Rover koji se razvija u ISAS-u je predviđen da bude korišćen u okviru misije na Mars – “MELOS” (Mars Exploration with a Lander-Orbiter Synergy) zakazanu za 2020.
U procesu razvoja samog rovera, nekoliko institucija paralelno razvija različite varijante, da bi se na kraju izabrala najbolja. Takođe, u samom ISAS-u je razvijeno nekoliko kinematskih konfiguracija čije se karakteristike testiraju na specijalnom peščanom terenu sa kamenjem kao preprekama, koji je zamišljen da replikuje Mesečevu/Marsovsku površinu, testiraju se algoritmi upravljanja i navigacije.

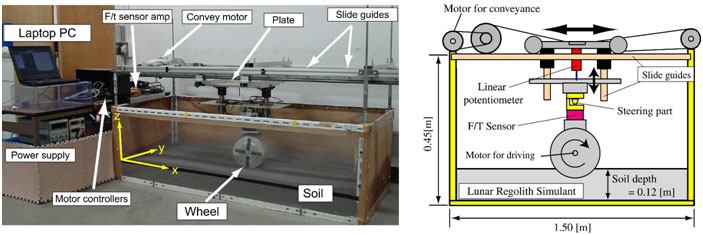
Posebna pažnja se pridaje i ispitivanju različitih mehaničkih konstrukcija točkova, da bi ih učinili što prilagodljivijim terenu kakav je onaj na ciljanom nebeskom telu, peskovit i kamenit. Postoji takođe posebna eksperimentalna postavka za testiranje ovih karakteristika. Na slici br.1 je prikazan primer ovakve postavke na Kohoku Univerzitetu.
Problem koji se najčešće javlja je proklizavanje i lateralno pomeranje točkova usled nestabilne podloge, što dovodi do grešaka u korišćenom matematičkom modelu. Ova pojava najviše utiče na pojavu greške u proceni pozicije i orijentacije rovera baziranoj na principu odometrije. Mnogi radovi su objavljeni na temu optimizacije konstrukcije točkova i minimizacije grešaka. Alternativni pristupi su korišćenje vizuelne odometrije, odnosno sistemom vizije detektovati karakteristične, istaknute i lako prepoznatljive, oblasti u okruženju i pratiti njihovu poziciju/pomeranje tokom kretanja i na taj način definisati pređeni put.
U nastavku su predstavljeni neki od rovera iz jedne ISAS-ove laboratorije čiji je direktor profesor Takashi Kubota.
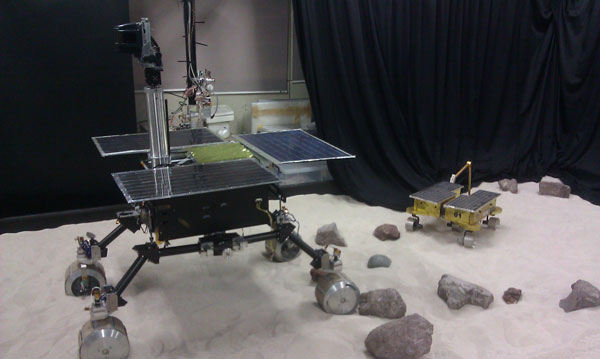
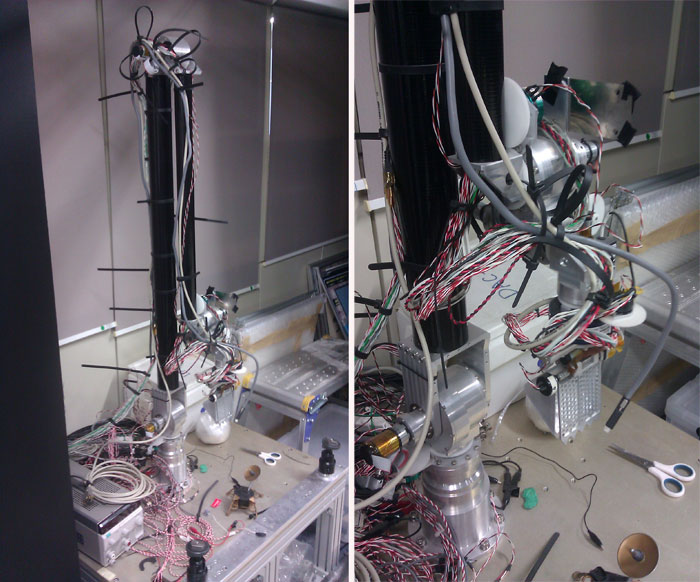
Glavni rover koji se trenutno koristi za testiranje navigacionih algoritama je prikazan na slici br.1. Poseduje solarne panele koji mogu da obezbede oko 50W napajanja. Ima 4 točka od kojih se svakim može zasebno upravljati i skretati. Prednji i zadnji točkovi su spregnuti pasivnim amortizerima koji koriste torzionu oprugu. Na vrhu stuba se nalazi sistem za viziju, sa dva stepena slobode (pan – tilt). Trenutno se tu koristi komercijalni 2D laserski skener (sredina) i dve kamere sa strane za stereo viziju. Komunikacija sa računarom se vrši putem bežične mreže.
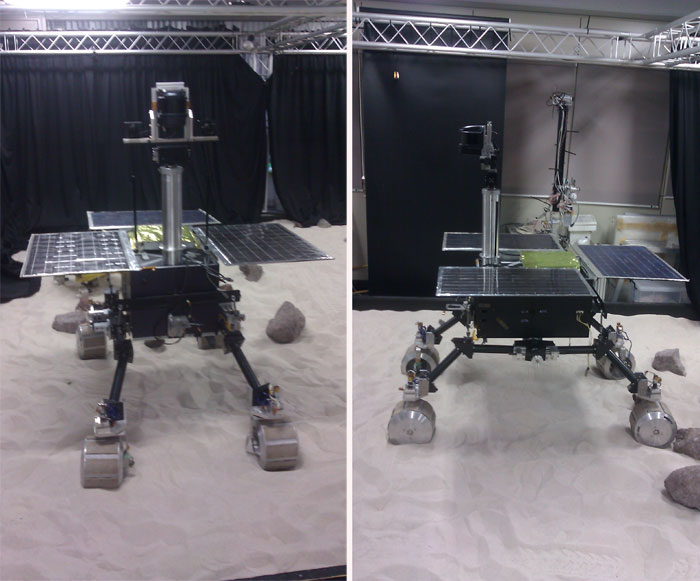
Slika 1. Glavni rover
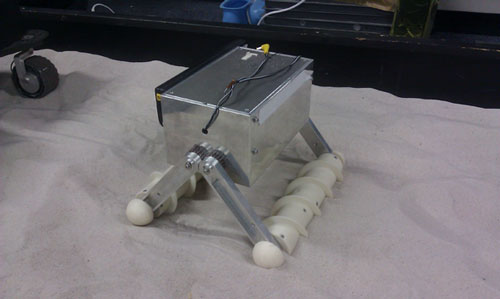
Ova sledeća, u najmanju ruku, zanimljiva konfiguracija (Slika br.2) je zamišljena kao hodajući robot za istraživanje nepoznatih sredina. Projektovan je tako da hoda koristeći četiri noge, a u slučaju da krene gubiti ravnotežu ili se potpuno prevrne, preostale dve noge se koriste da bi se nastavio normalan hod. Postoji takođe i mogućnost da se noge skupe i da se robot kreće kotrljajući, što moze biti veoma pogodno za peskovite površine. Naravno, algoritmi za upravljanje ovog tipa robota su daleko kompleksniji nego oni iz prethodnog primera, jer pored ostalog moraju održavati stabilnost hoda. Interesantna činjenica vezana za ovog robota je to što je profesor Kubota došao na ovu ideju u snu, zapisao ju je i realizovao uz pomoć studenata!


Slika br.2 Rover iz sna profesora Kubota
Naredni rover (Slika br.3) poseduje samo dva aktuatora (motora) koji pokreću dva specijalno dizajnirana točka, nalik na pužne prenosnike. To omogućava kretanje u pravcu njihovih osa rotacije, ali takođe i rotaciju samog rovera oko svoje centralne vertikalne ose.
Slika br.3 Rover sa dva aktuatora
Ova dva rovera (Slika br.4) su manji modeli koji su pre korišćeni za testiranje osnovnih algoritama za navigaciju. Njihovo telo se sastoji od dva međusobno pomična dela radi lakšeg prelaženja preko prepreka. Obe verzije imaju po 5 točkova.

Slika br.4 Roveri sa solarnim pločama
Prikazani manipulator (Slika br.5) kao izvršni element ima “kašikastu” alatku koja moze da kupi uzorke, hvatajući ih, ali takođe i zahvatajući ih, što je neophodno za uzimanje peskovitih, rastresitih uzoraka. Njegova primena je na fiksnoj baznoj stanici, na kojoj bi bio pričvršćen i prikupljao uzorke koji bi se vraćali na zemlju.
Slika br.5 Rover za prikupljanje uzoraka
Svi ovi roveri nemaju još uvek imena, neki se vode po misijama za koje se testiraju. Imena se ne daju prototipovima, posto su to bukvalno samo platforme na kojima testiraju navigaciju, kretanje i sl..
Navigacija robota
Što se problema navigacije robota u nepoznatoj sredini tiče, postoji niz faktora koji se moraju uzeti u obzir, od kojih su neki ovde navedeni. Među prvima je način percepcije svog okruženja. Mape Meseca, odnosno Marsa visoke rezolucije (npr. prečnika točka rovera) ne postoje, već samo grube slike koje su napravili orbiteri. Ovakve mape su dovoljne za definisanje globalnih ciljeva i obilaženje velikih prepreka kao što su krateri, dok je za izbegavanje neposrednih, manjih, prepreka potrebno koristiti sisteme za detekciju istih na samom roveru. Ova vrsta zadatka bi se idealno izvršavala u realnom vremenu, ali zbog velikih međuplanetarnih rastojanja dolazi do značajnog kašnjenja upravljačkog signala i povratnih informacija, što veoma otežava ovakav vid upravljanja.
Naredno ograničenje oko koga se prave kompromisi su kompleksnost navigacionih algoritama i mesto njihovog izvršenja. Ovo je uslovljeno ograničenom procesnom moći računara na roveru, koje je direktno uzrokovano ograničenom snagom napajanja. Stoga se pribegava polu-autonomnim roverima, odnosno prikupljanju informacija, slanju istih u Zemaljsku bazu gde se proračunava putanja, i povratak upravljačkih komandi. Ovde se dolazi do tačke gde je potrebno praviti kompromise i naći idealno rešenje, jer se moraju uzeti u obzir i prethodno pomenuta ograničenja brzine putovanja signala i količine informacija. Još jedan od aspekata vredan pomena, koji se uzima u obzir prilikom projektovanja rovera, su temperaturna i radijaciona izolacija, da bi se obezbedio nominalan rad svih komponenti u dozvoljenim opsezima.
U slučaju zemljinog satelita, za jedan ciklus slanja i primanja radio talasa potrebno je 2-3s, dok u slu
čaju Marsa ovo vreme može varirati od par minuta, preko 20ak minuta, pa čak i do potpune obustave komunikacije kada se Mars nalazi sa druge strane Sunca. Takođe, ograničen je i protok podataka koji se u jednoj sesiji mogu slati. Iz ovog razloga se teži sve većoj nezavisnosti, odnosno autonomiji rovera pri donošenju odluka.Da bi robot stvorio digitalnu sliku svog okruženja, najčešće se koristi stereovizija (trenutno implementirana na Mars Exploration Rover-ima: Spirit i Oportunity i na novom Curiosity-ju). Druga opcija je korišćenje laserskih skenera koji mere udaljenost senzora od čvrstog tela u određenom pravcu iz definisanog opsega (npr. 270 stepeni) oko rovera, primenom laserskih zraka. Popularne su takodje i RGBD (Red Green Blue Depth) i Time-of-flight kamere, koje pored slike automatski daju i informaciju o dubini, odnosno udaljenosti pojedinih tačaka u prostoru. Problem laserskih skenera i poslednje dve opcije je to što troše mnogo energije koje na roveru ima u vrlo ograničenim količinama. Ovo ograničenje je još izraženije kod japanskih rovera, jer su se Japanci kao nacija potpuno odrekli korišćenja bilo kakvog vida nuklearne energije u svemirskim svrhama, za proizvodnju električne energije (zbog ovoga njihovi sateliti ne koriste nuklearnu energiju za napajanje Jonske propulzije već se npr. razvijaju solarna jedra). Stoga, kapacitet napajanja isključivo zavisi od energije prikupljene pomoću solarnih panela. Da bi premostili ovu prepreku, u ISAS-u razvijaju novu vrstu pouzdanih laserskih skenera, tzv. Flash Laser Scanner, koji bi funkcionisao na principu povremenih “bljesaka” laserskih zraka koji na sa određenom učestalošću skeniraju okruženje i tako formiraju mapu visine terena (digital elevation map) na osnovu koje se dalje vrši navigacija.
Naredno ograničenje oko koga se prave kompromisi su kompleksnost navigacionih algoritama i mesto njihovog izvršenja. Ovo je uslovljeno ograničenom procesnom moći računara na roveru, koje je direktno uzrokovano ograničenom snagom napajanja. Stoga se pribegava polu-autonomnim roverima, odnosno prikupljanju informacija, slanju istih u Zemaljsku bazu gde se proračunava putanja, i povratak upravljačkih komandi. Ovde se dolazi do tačke gde je potrebno praviti kompromise i naći idealno rešenje, jer se moraju uzeti u obzir i prethodno pomenuta ograničenja brzine putovanja signala i količine informacija. Još jedan od aspekata vredan pomena, koji se uzima u obzir prilikom projektovanja rovera, su temperaturna i radijaciona izolacija, da bi se obezbedio nominalan rad svih komponenti u dozvoljenim opsezima.
Takođe, jedna od ideja koja se takodje razvija u ISAS-u su UAV sistemi, tj. letelice sa koje bi letele po ugledu na ptice, zamahivanjem krila i jedrenjem radi uštede energije i iskorišćavanja slabije sile gravitacije.




 najidealniji za određenu aplikaciju?")














{kind=link}